У майбутньому доставляння терапевтичних препаратів саме туди, де вони потрібні в організмі, може стати завданням мініатюрних роботів. Не маленьких металевих гуманоїдів або біоподібних роботів; уявіть собі крихітні міхурові сфери.
Такі роботи матимуть довгий та складний список вимог. Наприклад, вони повинні будуть виживати в рідинах організму, таких як шлункові кислоти, і бути керованими, щоб їх можна було спрямовувати точно до цільових місць. Вони також повинні вивільняти свій медичний вантаж тільки після досягнення цілі, а потім бути абсорбованим організмом, не завдаючи шкоди.
Наразі мікророботи, які відповідають усім цим параметрам, були розроблені командою під керівництвом Каліфорнійського технологічного інституту. Використовуючи ботів, команда успішно доставила терапевтичні засоби, які зменшили розмір пухлин сечового міхура у мишей. Статтю з описом роботи опубліковано в журналі Science Robotics.
«Ми розробили єдину платформу, яка може розв'язати ці проблеми», — каже Вей Гао, професор медичної інженерії в Каліфорнійському технологічному інституті, дослідник Heritage Medical Research Institute та співавтор нової статті про ботів, яких команда називає біорозчинними акустичними мікророботами (БАМ). «Замість того, щоб вводити ліки в організм і дозволяти їм поширюватися всюди, тепер ми можемо направляти наших мікророботів безпосередньо до місця пухлини та вивільняти ліки у контрольований та ефективний спосіб», — каже Гао.
Концепція мікро- або нанороботів не нова. Люди розробляли їхні версії впродовж останніх двох десятиліть. Однак досі їхнє застосування в живих системах було обмежене, оскільки надзвичайно складно переміщати об'єкти з точністю у складних біологічних рідинах, таких як кров, сеча чи слина, каже Гао. Роботи також повинні бути біосумісними та біорозчинними, тобто вони не повинні залишати після себе нічого токсичного в організмі.
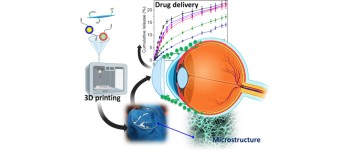
Розроблені Caltech мікророботи є сферичними мікроструктурами, що виготовлені з гідрогелю, званого полі(етиленгліколь) діакрилатом. Гідрогелі - це матеріали, які спочатку знаходяться в рідкій або смоляній формі й стають твердими, коли решітка полімерів, що знаходяться всередині них, стає зшитою або твердне. Ця структура і склад дозволяють гідрогелям утримувати великі об'єми рідини, що робить багато з них біосумісними. Метод виготовлення адитивного виробництва також дозволяє зовнішній сфері переносити терапевтичний вантаж до цільової ділянки в організмі.
Щоб розробити рецепт гідрогелю та виготовити мікроструктури, Гао звернувся до Джулії Р. Грір з Caltech, професору матеріалознавства, механіки та медичної інженерії імені Рубена Ф. та Донни Меттлер, директору Фонду Флетчера Джонса Інституту нанонауки Кавлі та співавтору статті. Група Грира має досвід у двофотонній полімеризаційній (TPP) літографії, методі, який використовує надзвичайно швидкі імпульси інфрачервоного лазерного світла для вибіркового зшивання світлочутливих полімерів відповідно до певного шаблону. Метод дозволяє створювати структуру шар за шаром, способом, що нагадує 3D-принтери, але в цьому випадку з набагато більшою точністю та складністю форми.
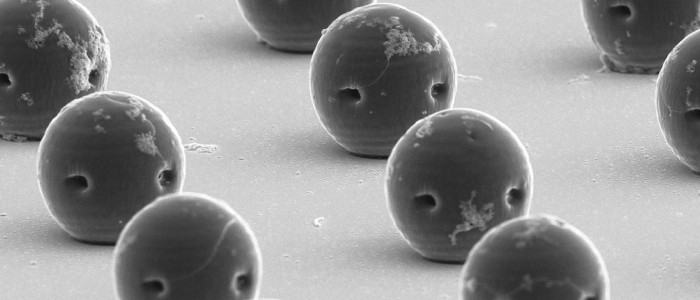
Групі Грира вдалося «написати» або видрукувати мікроструктури діаметром приблизно 30 мікронів — приблизно діаметр людського волосся.
«Цю конкретну форму, цю сферу дуже складно створити», — каже Грір. «Потрібно знати певні способи, щоб сфери не знищувалися власними силами. Ми змогли не тільки синтезувати смолу, яка містить усю біофункціоналізацію та всі необхідні з медичного погляду елементи, а й змогли видрукувати їх у точній сферичній формі з необхідною порожниною».
У своїй остаточній формі мікророботи включають магнітні наночастинки та терапевтичний препарат у зовнішню структуру сфер. Магнітні наночастинки дозволяють вченим спрямовувати роботів у бажане місце за допомогою зовнішнього магнітного поля. Коли роботи досягають своєї цілі, вони залишаються на місці, а препарат пасивно дифундує назовні.
Гао і його колеги спроєктували зовнішню частину мікроструктур гідрофільною, щоб окремі роботи не злипалися під час переміщення по тілу. Однак внутрішня поверхня мікроробота не може бути гідрофільною, оскільки їй необхідно затримувати бульбашки повітря, а бульбашки легко лопаються або розчиняються.
Щоб створити гібридних мікророботів, які є гідрофільними зовні, так і гідрофобними всередині, дослідники розробили двоетапну хімічну модифікацію. Спочатку вони прикріпили довголанцюгові молекули вуглецю до гідрогелю, зробивши всю гідрофобну структуру. Потім дослідники використовували техніку, яку називають травленням кисневою плазмою, щоб видалити деякі з цих довголанцюгових вуглецевих структур із зовнішнього боку, залишивши зовнішню частину гідрофільною, а внутрішню — гідрофобною.
«Це було одним із ключових нововведень цього проєкту», — каже Гао, який також є стипендіатом Рональда та Джоан Вілленс. "Ця асиметрична модифікація поверхні, де внутрішня частина гідрофобна, а зовнішня - гідрофільна, дійсно дозволяє нам використовувати багато роботів і при цьому утримувати бульбашки протягом тривалого часу в біорідинах, таких як сеча або сироватка".
Дійсно, команда показала, що бульбашки можуть зберігатися до кількох днів при такій обробці порівняно з кількома хвилинами, які були можливі раніше.
Наявність захоплених бульбашок також має вирішальне значення для переміщення роботів і відстеження їх за допомогою візуалізації в реальному часі. Наприклад, для забезпечення руху команда спроєктувала сферу мікроробота із двома циліндричними отворами — один зверху та інший збоку. Коли роботи піддаються впливу ультразвукового поля, бульбашки вібрують, змушуючи навколишню рідину витікати з роботів через отвір, просуваючи роботів через рідину. Команда Гао виявила, що використання двох отворів дало роботам можливість рухатися не тільки в різних в'язких біорідинах, а й на більш високих швидкостях, ніж можна досягти за допомогою одного отвору.
Усередині кожної мікроструктури знаходиться яйцеподібний міхур, який є чудовою контрастною речовиною для ультразвукової візуалізації, що дозволяє здійснювати моніторинг ботів in vivo в реальному часі. Команда розробила спосіб відстеження мікророботів у міру їхнього переміщення до своїх цілей за допомогою експертів з ультразвукової візуалізації Михайла Шапіро, професора хімічної інженерії та медичної інженерії імені Макса Дельбрука в Калтеху, дослідника Медичного інституту Говарда Х'юза; співавтора Ді Ву, наукового співробітника та директора Центру DeepMIC у Калтеху; та співавтора Цифа Чжоу, професора офтальмології та біомедичної інженерії в USC.
Завершальний етап розробки включав тестування мікророботів як інструмент доставляння ліків на мишах з пухлинами сечового міхура. Дослідники виявили, що чотири доставляння терапевтичних засобів, наданих мікророботами протягом 21 дня, були ефективнішими для зменшення пухлин, ніж терапія іншого типу.
"Ми вважаємо, що це дуже перспективна платформа для доставляння ліків і точної хірургії", - говорить Гао. «Заглядаючи у майбутнє, ми могли б оцінити використання цього робота як платформу для доставляння різних типів терапевтичних вантажів чи агентів для різних станів. А у довгостроковій перспективі ми сподіваємося випробувати це на людях».