Наші м'язи це природні приводи. Саме сухожильна тканина генерує сили, що приводять наше тіло у рух. В останні роки інженери використовували справжню м'язову тканину для приведення в дію «біогібридних роботів», створених як із живої тканини, так і із синтетичних компонентів. Поєднуючи вирощені в лабораторії м'язи з синтетичними скелетами, дослідники створюють цілу низку гусеничних, крокувальних, плавців і захватів, що рухаються м'язами.
Але в більшості випадків ці конструкції обмежені обсягом рухів і потужністю, які вони можуть виробляти. Тепер інженери Массачусетського технологічного інституту прагнуть наділити біороботів силою підйому за допомогою штучних сухожиль.
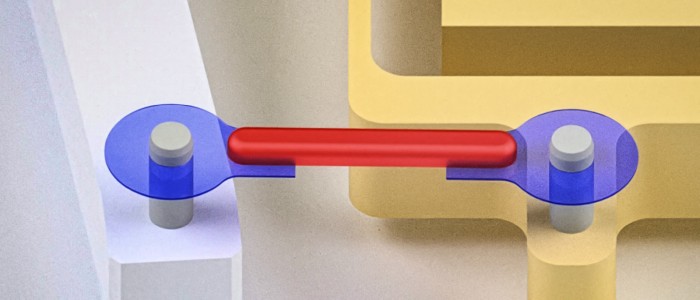
У дослідженні, опублікованому в журналі Advanced Science, дослідники розробили штучні сухожилля із міцного та гнучкого гідрогелю. Вони прикріпили схожі на гумові стрічки сухожилля до обох кінців невеликого фрагмента вирощеного в лабораторії м'яза, утворивши м'язово-сухожильний блок. Потім вони поєднали кінці кожного штучного сухожилля із пальцями роботизованого захоплення. Робот стискав пальці втричі швидше та з 30-кратним збільшенням сили порівняно з аналогічною конструкцією без сполучних сухожиль.
Дослідники припускають, що новий м'язово-сухожильний блок може бути інтегрований у широкий спектр біогібридних роботів, подібно до універсального інженерного елемента.
«Ми використовуємо штучні сухожилля як взаємозамінні з'єднувачі між м'язовими приводами та роботизованими скелетами», — каже провідний автор дослідження Риту Раман, доцент кафедри машинобудування (MechE) Массачусетського технологічного інституту. Така модульність може спростити розробку широкого спектра робототехнічних додатків - від мікрохірургічних інструментів до адаптивних автономних дослідницьких машин.
Зростання м'язів
Раман та її колеги з Массачусетського технологічного інституту знаходяться на передньому краї біогібридної робототехніки щодо нового напрямку, що виник в останнє десятиліття. Вони зосереджені на поєднанні синтетичних структурних роботизованих деталей з живою м'язовою тканиною як природних приводів.
"Більшість приводів, з якими зазвичай працюють інженери, дуже складно зробити маленькими", - говорить Раман. «Після певного розміру, базові фізичні закони перестають працювати. Перевага м'язів у тому, що кожна клітина - це незалежний привід, що генерує силу і створює рух. Тому, в принципі, можна створювати роботів справді маленького розміру».
М'язові приводи мають інші переваги, які команда Раман вже продемонструвала: тканина може ставати сильнішою в міру тренування і природним чином відновлюватися при травмах. З цих причин Раман та інші припускають, що м'язистих дроїдів одного разу можна буде відправляти на дослідження місць, надто віддалених чи небезпечних для людини. Такі боти, оснащені м'язами, могли б накопичувати силу для непередбачених переміщень або відновлюватися, коли допомога недоступна. Біогібридні боти також могли б служити невеликими хірургічними помічниками, що виконують тонкі мікромасштабні операції всередині тіла.
Всі ці майбутні сценарії мотивують Раман та інших шукати способи з'єднання живих м'язів із синтетичними скелетами. На сьогодні існують розробки, що включають вирощування м'язової смуги та прикріплення одного з її кінців до синтетичного скелета, подібно до того, як ми намотуємо гумку на два стовпчики. Коли м'яз стимулюється скорочення, він може стягувати частини скелета разом, створюючи бажаний рух.
Але цей метод призводить до великих втрат м'язової маси й з'єднання не завжди надійне. М'язи досить м'які порівняно зі структурними елементами, і ця різниця може призвести до їх розриву або від'єднання. Щобільше, найчастіше виконуються лише скорочення в центральній частині м'яза — обсяг яких відносно невеликий і генерує невелике зусилля.
«Ми думали, як припинити витрачати м'язовий матеріал, зробити його більш модульним, щоб він міг прикріплюватися до чого завгодно, і працювати ефективніше», — каже Раман. «Організм придумав рішення, яке полягає у створенні сухожиль, що займають проміжне положення між м'язами та кістками, що дозволяє подолати цю механічну невідповідність між м'якими м'язами та жорстким скелетом. Вони подібні до тонких тросів, які ефективно обвивають суглоби».
«Розумне з'єднання»
У своїй новій роботі Раман та її колеги розробили штучні сухожилля для поєднання натуральної м'язової тканини із синтетичним скелетом захоплення. Як матеріал вони вибрали гідрогель — м'який, але міцний гель на основі полімера. Раман отримала зразки гідрогелю від свого колеги та співавтора Сюаньхе Чжао, піонера у розробці гідрогелів у Массачусетському технологічному інституті. Група Чжао розробила рецепти гідрогелів різної міцності та еластичності, здатних прилипати до різних поверхонь, включаючи синтетичні та біологічні матеріали.
Щоб визначити, наскільки міцними та еластичними мають бути штучні сухожилля для роботи в їх конструкції захоплення, команда Раман спочатку змоделювала конструкцію як просту систему з трьох типів пружин, кожна з яких представляє центральний м'яз, два сполучні сухожилля та скелет захоплення. Вони надали м'язу і скелету певну жорсткість, яка була відома раніше, і використовували її для розрахунку жорсткості сполучних сухожиль, необхідних для переміщення захоплення на необхідну величину.
Внаслідок цього моделювання команда розробила рецепт гідрогелю певної жорсткості. Після отримання гелю дослідники акуратно витруїли з нього тонкі кабелі, щоб сформувати штучні сухожилля. Вони прикріпили два сухожилля до кожного кінця невеликого зразка м'язової тканини, вирощеного за допомогою стандартних лабораторних методів. Потім кожне сухожилля обмотали навколо невеликого штифта на кінці кожного пальця роботизованого захоплення – каркасної конструкції, розробленої професором механіки Мартіном Калпеппером, експертом у галузі проектування та створення прецизійних машин.
Коли команда стимулювала скорочення м'яза, сухожилля, своєю чергою, тягли захоплення, зводячи його пальці. У ході численних експериментів дослідники виявили, що м'язово-сухожильне захоплення працювало втричі швидше і створювало в 30 разів більше сили в порівнянні з захопленням, що приводиться в дію лише м'язовою тканиною (без штучних сухожиль). Нова конструкція на основі сухожиль також змогла підтримувати цю ефективність протягом понад 7000 циклів, або м'язових скорочень.
Загалом, Раман виявила, що додавання штучних сухожиль збільшило співвідношення потужності до маси робота в 11 разів, а це означає, що системі потрібно набагато менше м'язів для виконання того ж обсягу роботи.
"Потрібен лише невеликий привід, майстерно з'єднаний зі скелетом", - говорить Раман. «Зазвичай, якщо м'яз дуже м'який і прикріплений до чогось з високим опором, він просто порветься, перш ніж щось зрушити. Але якщо прикріпити його до чогось, наприклад, сухожилля, стійкого до розриву, воно зможе передавати зусилля через сухожилля і зможе рухати скелет, який інакше не зміг би зрушити».
Нова конструкція м'язів та сухожиль, розроблена командою, успішно поєднує біологію та робототехніку, говорить біомедичний інженер Симона Шюрле-Фінке, доцент кафедри медичних наук та технологій Швейцарської вищої технічної школи Цюриха.
"Жорсткі гідрогелеві сухожилля створюють більш фізіологічну архітектуру м'яз-сухожилля-кістка, що значно покращує передачу зусилля, довговічність і модульність", - говорить Шюрле-Фінке, який не брав участі в дослідженні. «Це просуває сферу досліджень у бік біогібридних систем, здатних функціонувати відтворено і в кінцевому підсумку поза лабораторними умовами».
Після створення нових штучних сухожиль група Раман переходить до розробки інших елементів, таких як захисні оболонки, подібні до шкіри, які дозволять використовувати роботів з м'язовим приводом в реальних умовах.



